Decentralized swarm trajectory generation for lidar-based aerial tracking in cluttered environments
Dec 13, 2023·
,
 ,
,
·
0 min read
,
,
·
0 min read
Longji Yin
Fangcheng Zhu
Yunfan REN
Fanze Kong
Fu Zhang
Abstract
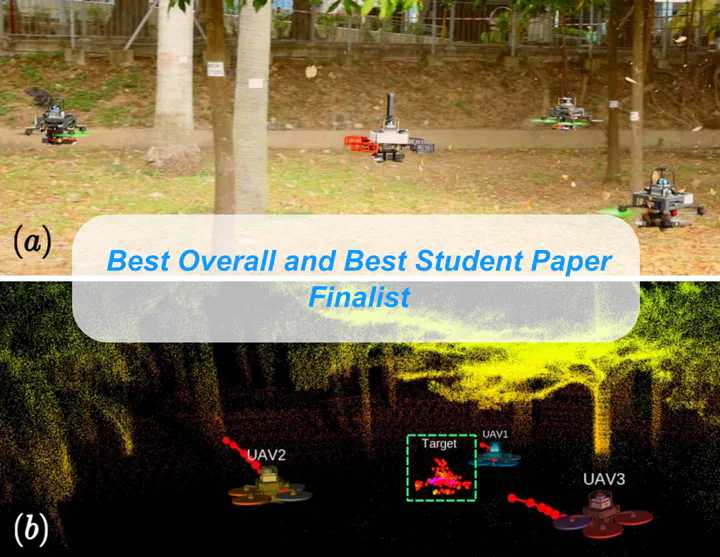
Aerial tracking with multiple unmanned aerial vehicles (UAVs) has wide potential in various applications. However, the existing works for swarm tracking typically lack the capability of maintaining high target visibility in cluttered environments. To address this deficiency, we present a decentralized planner that maximizes target visibility while ensuring collision-free maneuvers for swarm tracking. In this paper, each drone’s tracking performance is first analyzed by a decentralized kinodynamic searching front-end, which renders an optimal guiding path to initialize safe flight corridors and visible sectors. Afterwards, a polynomial trajectory satisfying the corridor constraints is generated by a spatial-temporal optimizer. Inter-vehicle collision and occlusion avoidance are also incorporated into the optimization objectives. The advantages of our methods are verified by extensive benchmark comparisons against other cutting-edge works. Integrated with an autonomous LiDAR-based swarm system, the proposed planner demonstrates its efficiency and robustness in real-world experiments with unknown cluttered surroundings.
Type
Publication
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)