New Role as Associate Editor for IEEE RA-L and ICRA 2026!
I am honored to have been elected as an Associate Editor for IEEE Robotics and Automation Letters (RA-L) and the IEEE International Conference on Robotics and Automation (ICRA) 2026.
My name is Yunfan Ren👨🎓 (任云帆), and I am a postdoctoral researcher in the Robotics and Perception Group (RPG), collaborating with Professor Davide Scaramuzza. I completed my Ph.D. in Robotics in July 2025, at the University of Hong Kong in the MaRS Lab, supervised by Professor Fu Zhang. My research focuses on Autonomous Aerial Robots, Swarm Intelligence, and Reinforcement Learning.
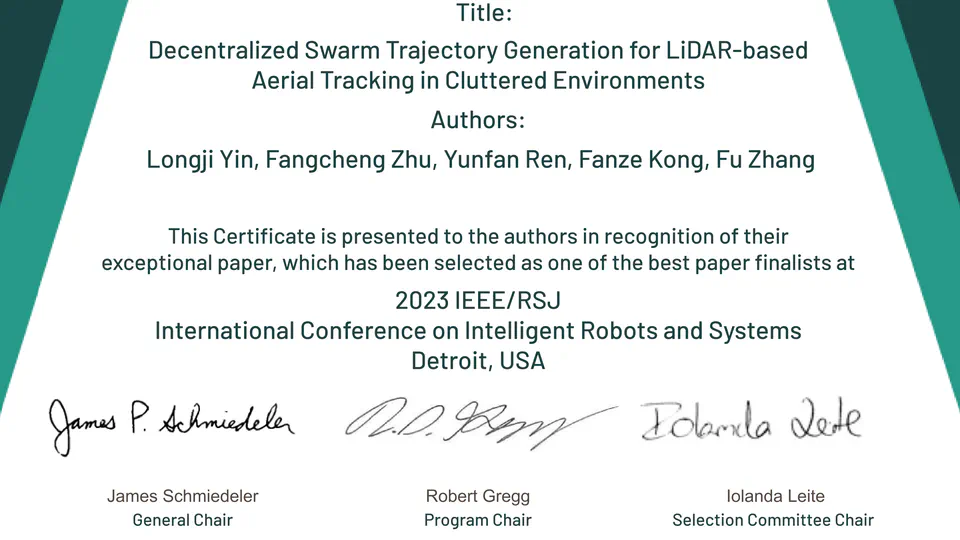
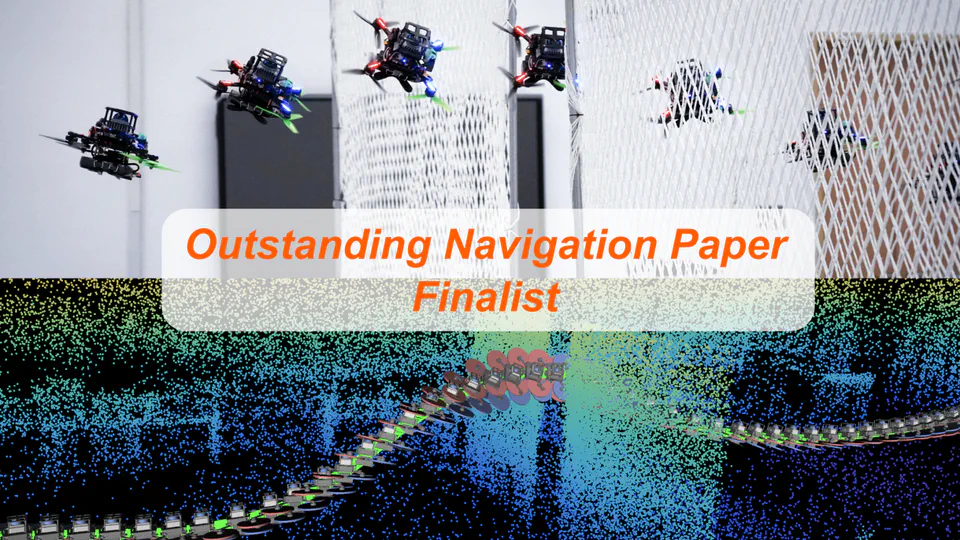
I have published 20 papers during my Ph.D. in leading journals and conferences, including Science Robotics, Nature Communications, T-RO (5 papers), T-Mech, IJRR, RA-L, ICRA (Outstanding Navigation Paper Finalist), and IROS (Best Overall and Best Student Paper Finalist). Of these, I am the first or co-first author on 12 papers, including 1 in Science Robotics , 2 in T-RO, 1 in T-Mech two paper awards in ICRA and IROS and others.
For a full list of my publications, visit my Google Scholar📈.
I am honored to serve as an Associate Editor for IEEE Robotics and Automation Letters (RA-L) and the International Conference on Robotics and Automation (ICRA). In these roles, I aim to foster high-quality research, promote innovative ideas, and strengthen the global robotics community.
Beyond academia, I actively contribute to open-source projects. My research code on GitHub has accumulated over 4k stars ⭐. Notable repositories include SUPER (★622), ROG-Map (★460), FAST-LIVO2 (★2.8k), and LiDAR_IMU_Init (★1k).
Ph.D. Robotics
University of Hong Kong
B.E. Automation
Harbin Institute of Technology (Shenzhen)
I am honored to have been elected as an Associate Editor for IEEE Robotics and Automation Letters (RA-L) and the IEEE International Conference on Robotics and Automation (ICRA) 2026.
Our new paper, “A Survey on LiDAR-based Autonomous Aerial Vehicles,” is now published in IEEE/ASME Transactions on Mechatronics.
Thrilled to join the Robotics and Perception Group under Prof. Davide Scaramuzza!
I was selected as a participant of RSS Pioneer Workshop 2025.
Huge thank to everyone accompanying this incredible journey!
Our new paper on autonomous aerial robots published in Science Robotics and been selected as the visual feature on Science website.