Contact-driven UAV navigation paper published in T-FR
Our paper "Traversing the Untraversable: Enabling UAV Navigation in the Extremely Dense Wild by Contact-driven Adaptation" has been published in IEEE Transactions on Field Robotics (T-FR).
Our paper "Traversing the Untraversable: Enabling UAV Navigation in the Extremely Dense Wild by Contact-driven Adaptation" has been published in IEEE Transactions on Field Robotics (T-FR).

I am honored to be selected as an Outstanding Reviewer for IEEE Robotics and Automation Letters (RA-L).
Read moreOur paper "An autonomous single-actuator UAV with omnidirectional field of view, high agility, and collision resistance" has been published in Nature Communications.
Our paper LAFR has been accepted by Robotics: Science and Systems (RSS).
Our IJRR paper "Memory-efficient boundary map for large-scale occupancy grid mapping" has been selected as an IJRR Seasonal Best Paper Finalist, among only three finalists.
Our paper "FAST-LIVO2: Fast, direct LiDAR-inertial-visual odometry" has been selected as a TRO 2026 Best Paper.
Our paper "Memory-efficient boundary map for large-scale occupancy grid mapping" has been accepted by The International Journal of Robotics Research (IJRR).

I am honored to have been elected as an Associate Editor for IEEE Robotics and Automation Letters (RA-L) and the IEEE International Conference on Robotics and Automation (ICRA) 2026.
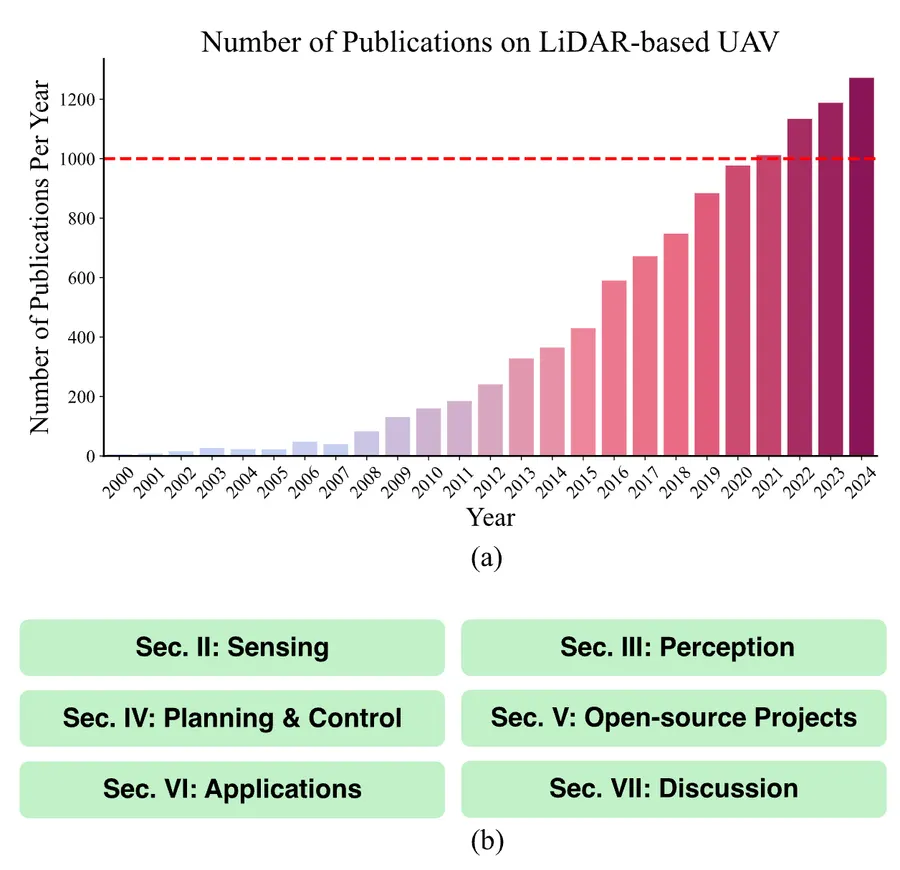
Our new paper, "A Survey on LiDAR-based Autonomous Aerial Vehicles," is now published in IEEE/ASME Transactions on Mechatronics.

Thrilled to join the Robotics and Perception Group under Prof. Davide Scaramuzza!
I was selected as a participant of RSS Pioneer Workshop 2025.
Huge thank to everyone accompanying this incredible journey!
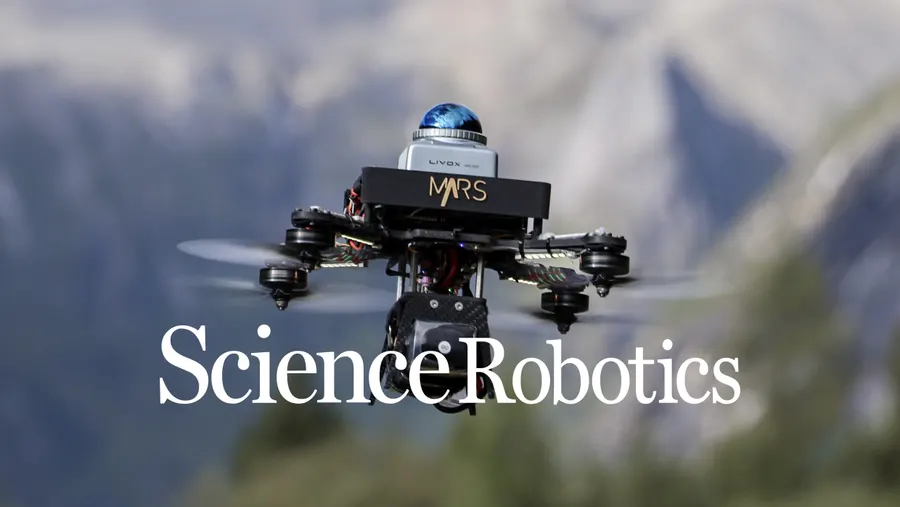
Our new paper on autonomous aerial robots published in Science Robotics and been selected as the visual feature on Science website.