
Swarm-LIO2: Decentralized Efficient LiDAR-Inertial Odometry for Aerial Swarm Systems
Decentralized, robust and efficient LiDAR-inertial odometry for a swarm of aerial robots with centimeter-level accuracy/
Dec 25, 2024

Real-time Bandwidth-efficient Occupancy Grid Map Synchronization for Multi-Robot Systems
Dec 25, 2024
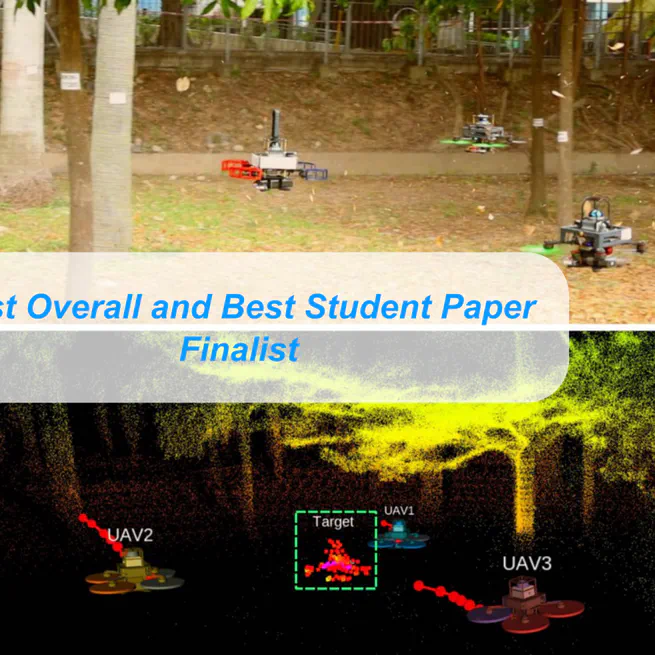
Decentralized swarm trajectory generation for lidar-based aerial tracking in cluttered environments
Dec 13, 2023

Swarm-LIO: Decentralized Swarm LiDAR-inertial Odometry
Jul 4, 2023