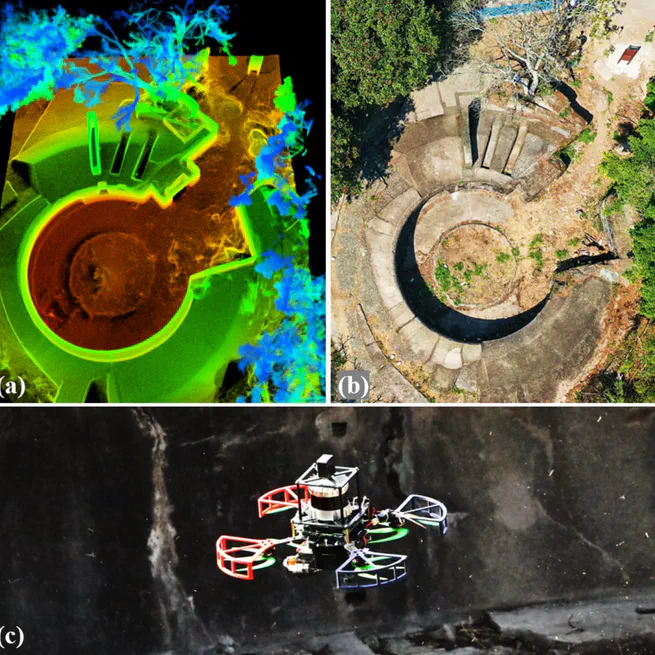
Rog-map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar-based motion planning
Dec 25, 2024
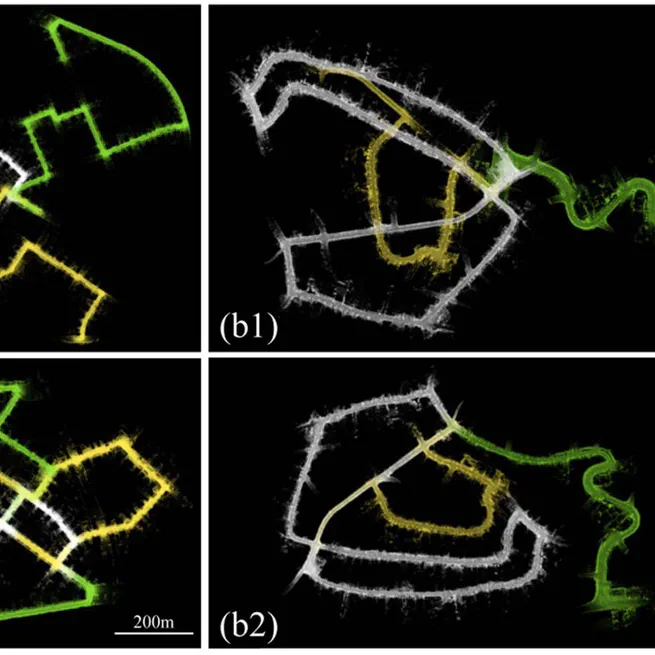
Large-Scale Multi-Session Point-Cloud Map Merging
Nov 21, 2024
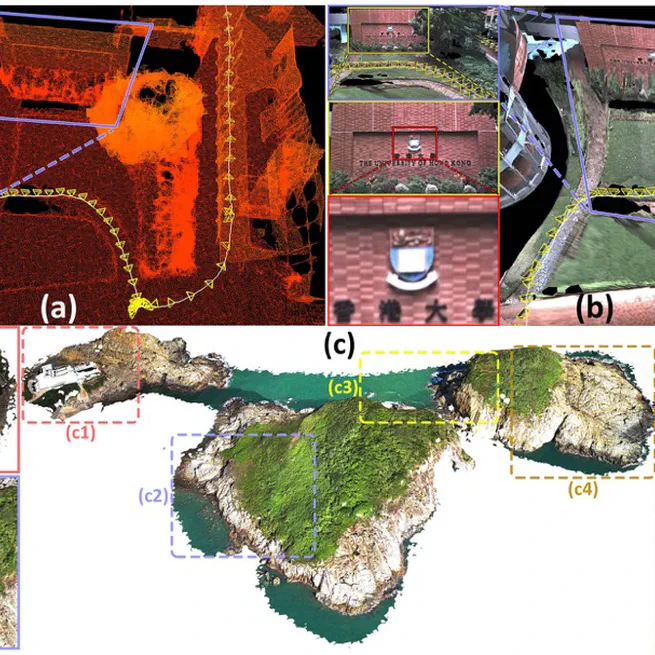
Immesh: An immediate lidar localization and meshing framework
Nov 1, 2023
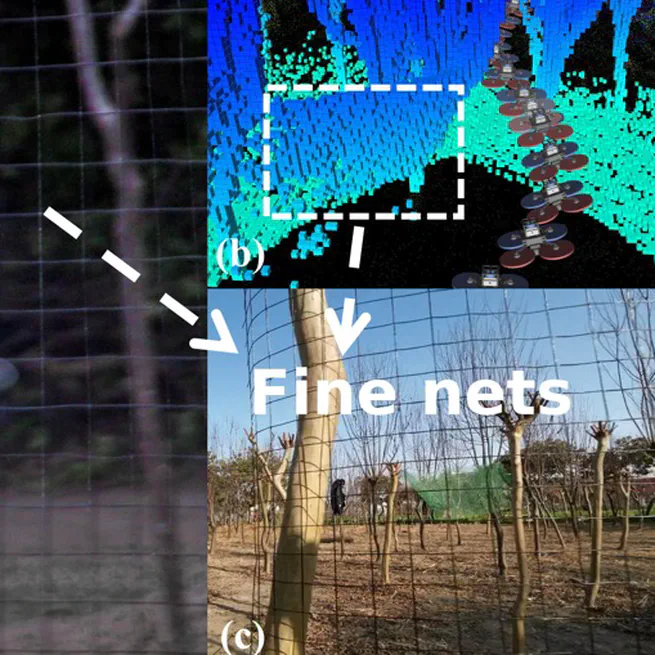
Occupancy grid mapping without ray-casting for high-resolution lidar sensors
Oct 16, 2023