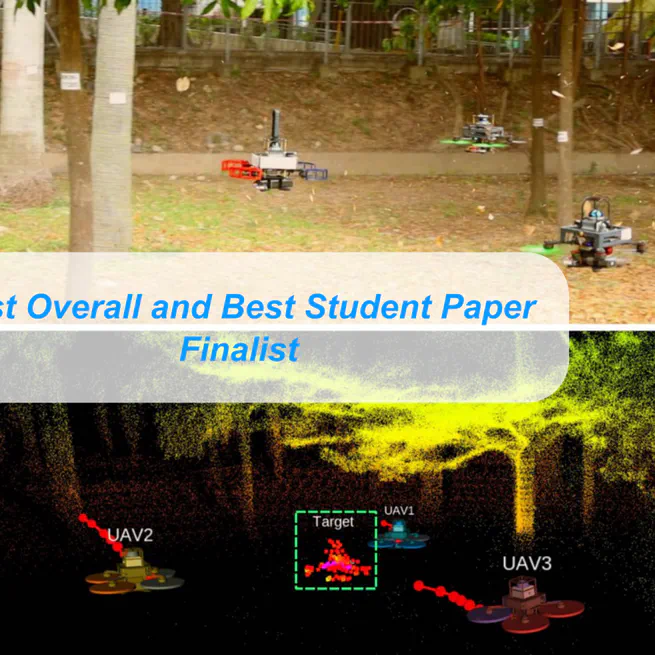
Decentralized swarm trajectory generation for lidar-based aerial tracking in cluttered environments
Dec 13, 2023
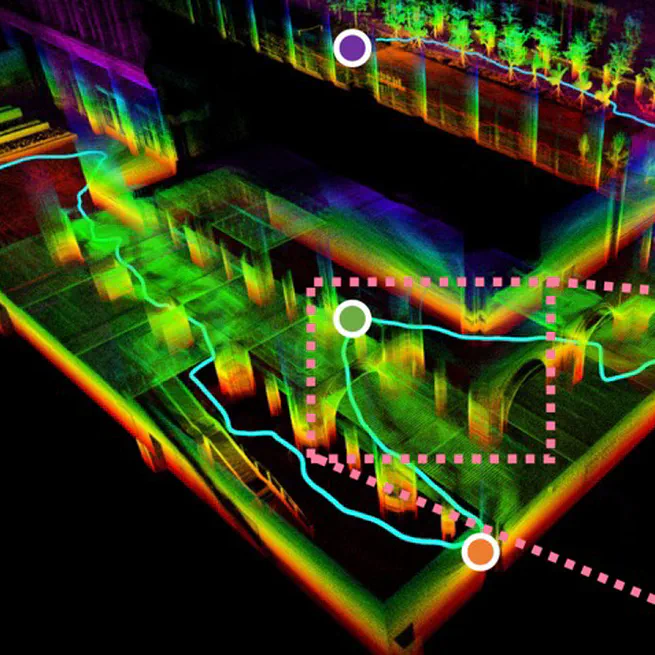
Bubble Explorer: Fast UAV Exploration in Large-Scale and Cluttered 3D-Environments Using Occlusion-Free Spheres
Dec 13, 2023
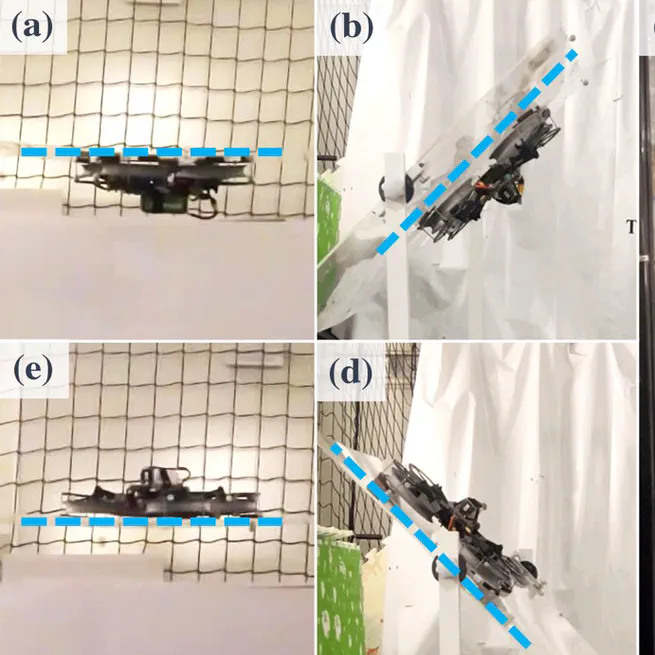
Perch a Quadrotor on Planes by the Ceiling Effect
Sep 28, 2023

Swarm-LIO: Decentralized Swarm LiDAR-inertial Odometry
Jul 4, 2023
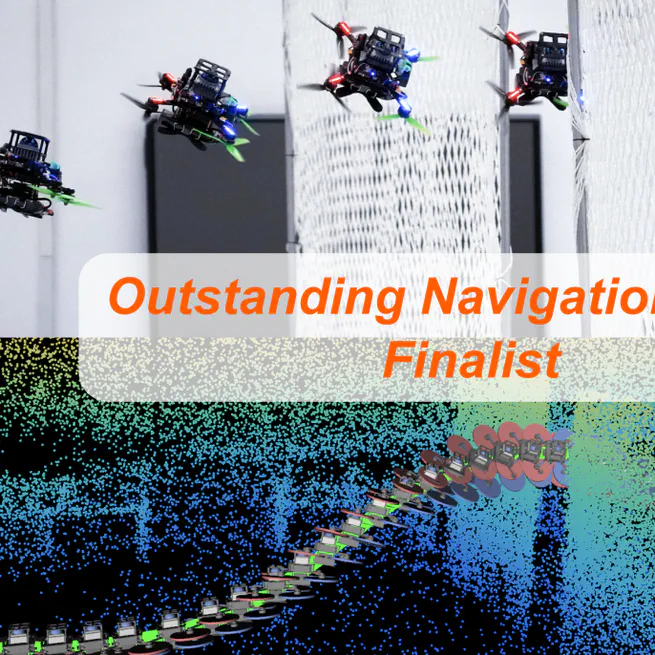
Online Whole-Body Motion Planning for Quadrotor using Multi-Resolution Search
Jul 4, 2023

Bubble planner: Planning high-speed smooth quadrotor trajectories using receding corridors
Oct 1, 2022

Vision-encoder-based Payload State Estimation for Autonomous MAV With a Suspended Payload
Dec 26, 2021