
Swarm-LIO2: Decentralized Efficient LiDAR-Inertial Odometry for Aerial Swarm Systems
Decentralized, robust and efficient LiDAR-inertial odometry for a swarm of aerial robots with centimeter-level accuracy/
Dec 25, 2024
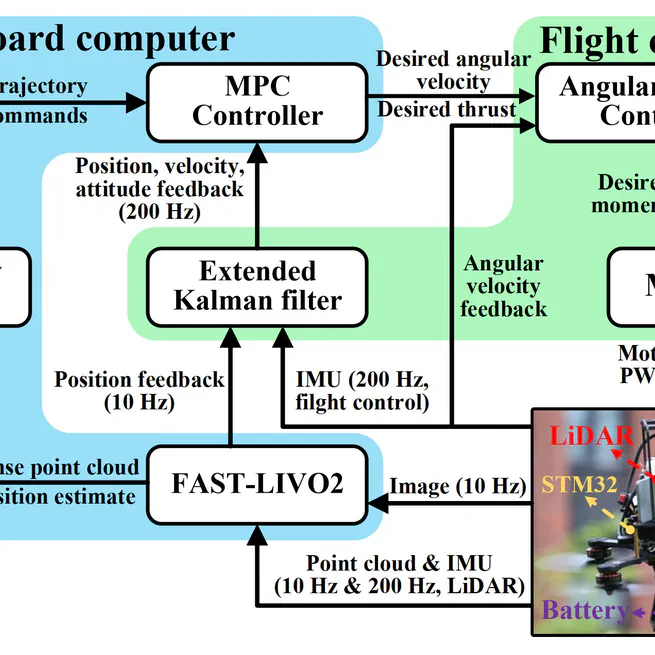
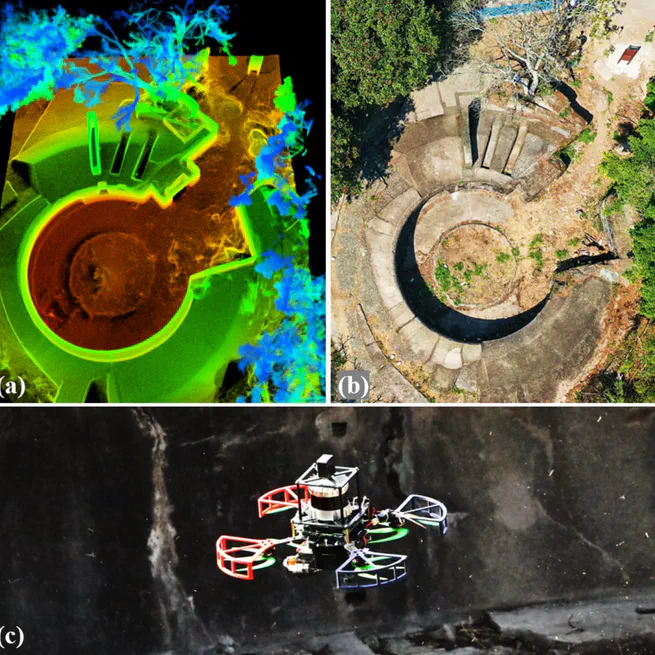
Fast-livo2: Fast, direct lidar-inertial-visual odometry
Fast, direct and tightly-coupled LiDAR-inertial-visual odometry.
Nov 19, 2024
Occupancy grid mapping without ray-casting for high-resolution lidar sensors
Oct 16, 2023