Safety-assured High-speed Navigation for MAVs
High-speed and safe autonomous navigation for MAVs in unknown environments with fully onboard LiDAR-centric sensing and computation to achieve high-speed flights over 20 m/s
Jan 29, 2025

Autonomous Tail-Sitter Flights in Unknown Environments
Maybe the first autonomous tailsitter eVTOL that can avoid obstacles in unknown environments with onboard sensing and computation and flying at a high-speed over 15 m/s.
Jan 6, 2025

Swarm-LIO2: Decentralized Efficient LiDAR-Inertial Odometry for Aerial Swarm Systems
Decentralized, robust and efficient LiDAR-inertial odometry for a swarm of aerial robots with centimeter-level accuracy/
Dec 25, 2024
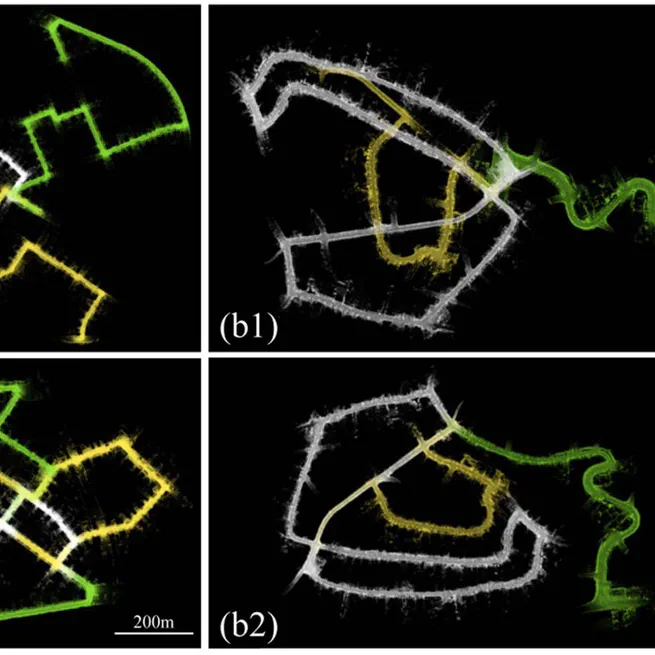
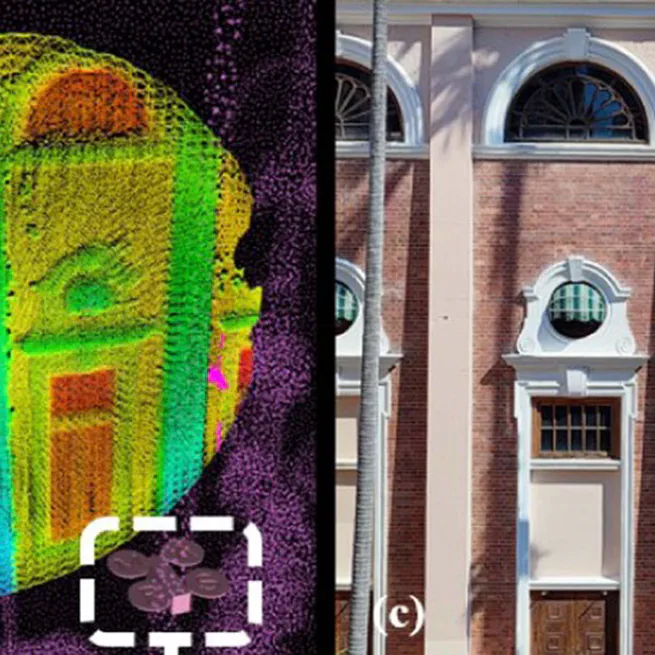
Large-Scale Multi-Session Point-Cloud Map Merging
Nov 21, 2024
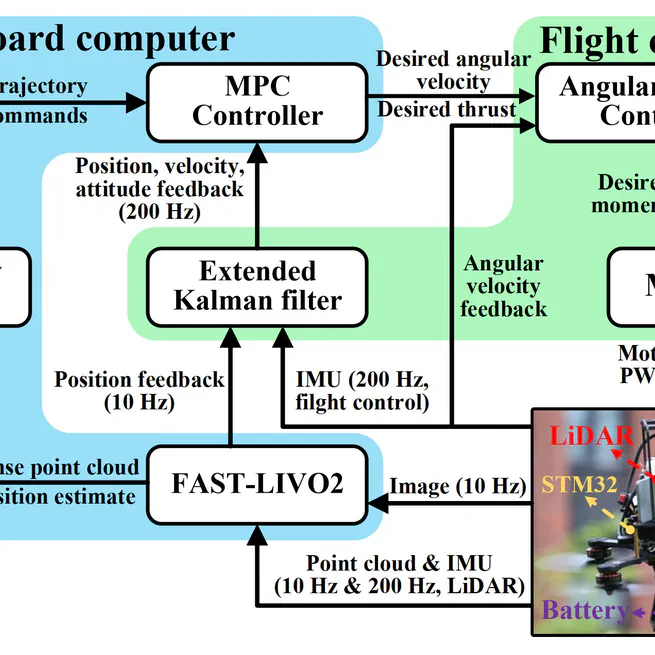
Fast-livo2: Fast, direct lidar-inertial-visual odometry
Fast, direct and tightly-coupled LiDAR-inertial-visual odometry.
Nov 19, 2024

Trajectory Generation and Tracking Control for Aggressive Tail-Sitter Flights
Nov 7, 2023
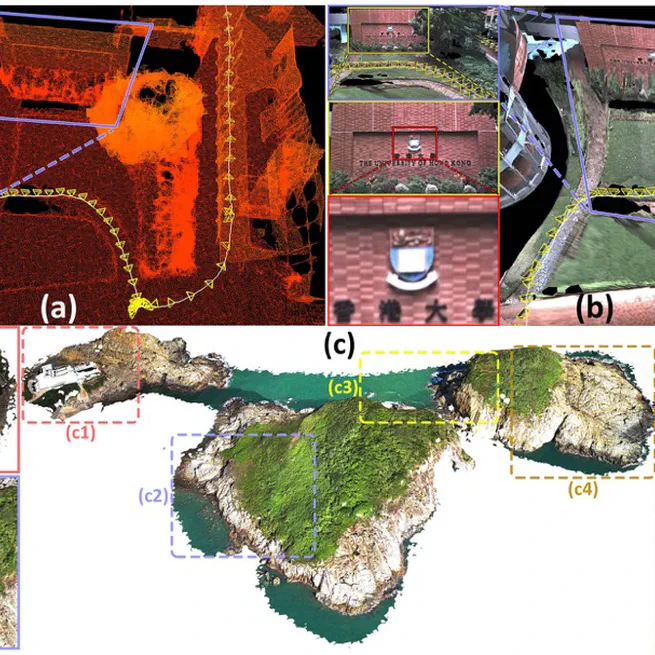
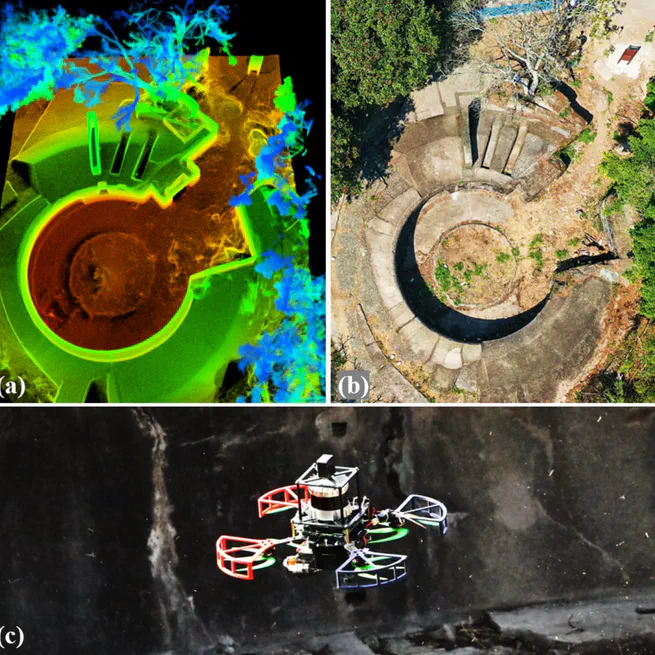
Immesh: An immediate lidar localization and meshing framework
Nov 1, 2023
Occupancy grid mapping without ray-casting for high-resolution lidar sensors
Oct 16, 2023
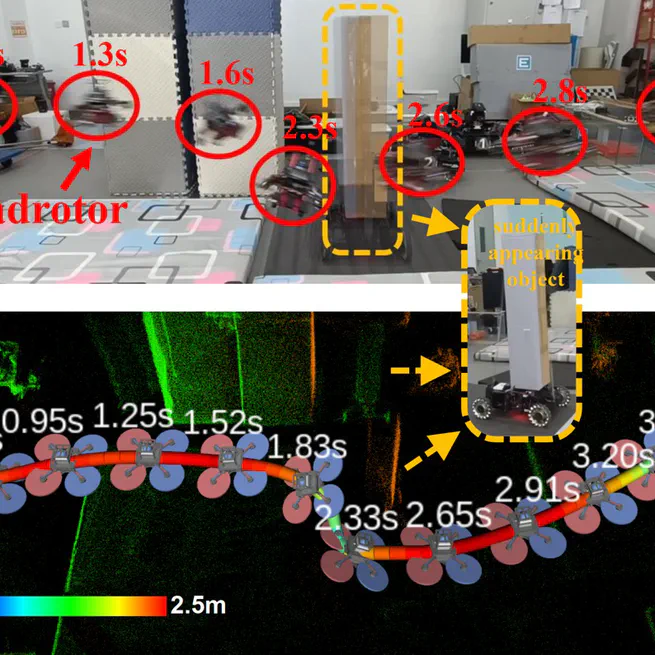
Integrated Planning and Control for Quadrotor Navigation in Presence of Suddenly Appearing Objects and Disturbances
Sep 4, 2023
MARSIM: A Light-Weight Point-Realistic Simulator for LiDAR-Based UAVs
Apr 3, 2023