loam_livox
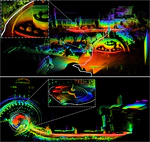
Loam-Livox is a robust, low drift, and real
time odometry and mapping package for
Livox LiDARs, significant low cost and high performance LiDARs that are
designed for massive industrials uses. Our package address many
key issues: feature extraction and selection in a very limited
FOV, robust outliers rejection, moving objects filtering, and
motion distortion compensation. In addition, we also integrate
other features like parallelable pipeline, point cloud
management using cells and maps, loop closure, utilities for
maps saving and reload, etc. To know more about the details,
please refer to our related paper:)