LOAM_Livox: A robust LiDAR Odometry and Mapping (LOAM) package for Livox-LiDAR
 r3live_cover
r3live_cover
1. Introduction


Loam-Livox is a robust, low drift, and real time
odometry and mapping package for
Livox LiDARs, significant low cost and high performance LiDARs that are
designed for massive industrials uses. Our package address many
key issues: feature extraction and selection in a very limited
FOV, robust outliers rejection, moving objects filtering, and
motion distortion compensation. In addition, we also integrate
other features like parallelable pipeline, point cloud management
using cells and maps, loop closure, utilities for maps saving and
reload, etc. To know more about the details, please refer to our
related paper:)

Our related paper: our related papers are now available on arxiv:
- Loam_livox: A fast, robust, high-precision LiDAR odometry and mapping package for LiDARs of small FoV
- A fast, complete, point cloud based loop closure for LiDAR odometry and mapping
Our related video: our related videos are now available on YouTube (click below images to open):


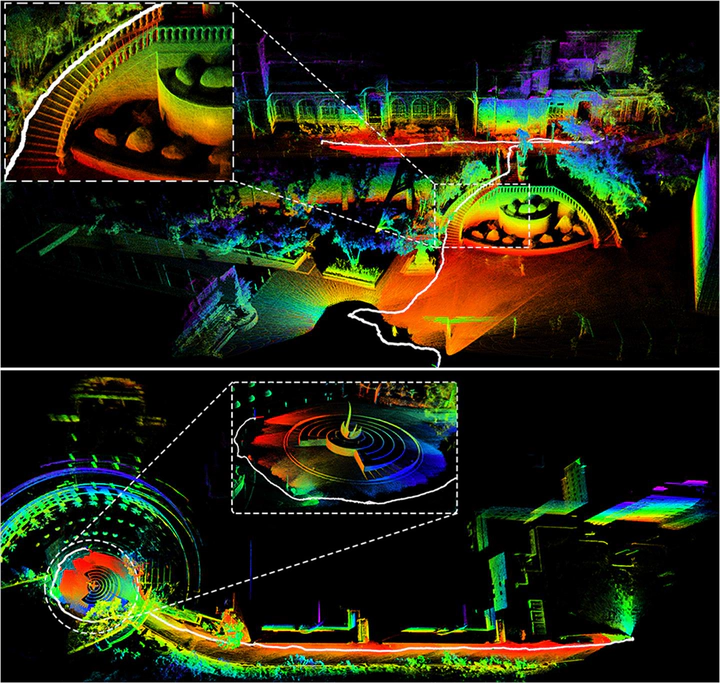
Our mapping results reconstructed with Livox-mid40 LiDAR:






Jiarong Lin
Ph.D. candidate in Robotics🤖
My research interests include Simultaneous localization and mapping (SLAM), Multi-sensor (i.e., LiDAR-Inertial-Visual) Fusion, and 3D reconstruction. My popular works include: R3LIVE, FAST-LIO, loam-livox, R2LIVE, and ImMesh🆕.